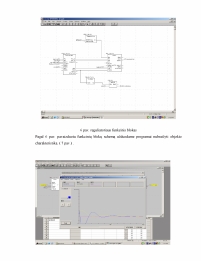
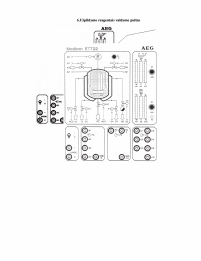
Suprojektuoti reaktoriaus užpildymo reagentais ir temperatūros automatinio reguliavimo sistemą, parenkant programuojamą valdiklį ir diskrecinių bei analoginių įvedimo ir išvedimo signalų modulius. Teorija. Reguliuojamas objektas. Darbas su ConCept. Pasirinkto valdiklio CPU pagrindiniai techniniai duomenys. Užpildymo reagentais valdymo pultas.










 711.66 KB
711.66 KB